
- 정격 전압: AC220V50/60Hz
- 기계 순중량: 68kg 50kg
- 최대 전력 : 1800W
- 냉각 방식 : 냉풍/수중 이중 냉각 방식
- 밀봉 직경 : φ15-75mm 15MM-45MM 30MM-60MM
- 병 높이: 20-180mm
- 작업 방법 : 계속 작업
- 적용 범위: 대량 생산 패치
- 밀봉 속도: 0-200병/분
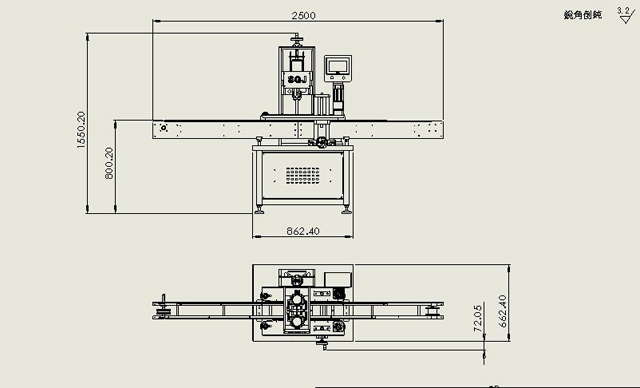
- 포장 크기: 1600*450*1500mm
- 발전기 크기: 1450*410*1300mm
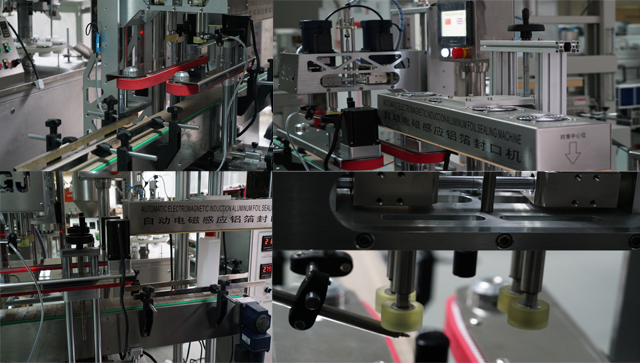
이 라인에는 유도 밀봉기 및 인라인 캡핑기 같은 두 가지 주요 기계가 포함됩니다.
이 기계는 분석 에이전트 실험실에서 사용되는 의료용 병의 캡핑-봉인에 적합합니다. 전체 라인에는 병 턴테이블이나 배치 코딩 기능과 같은 보조 장비가 장착될 수 있습니다.
각 기계에 대한 기본 데이터는 아래와 같습니다.

유도 밀봉, 즉 캡 밀봉은 플라스틱 및 유리 용기의 상단을 밀폐하기 위해 내부 밀봉을 가열하는 비접촉 방식입니다. 이 밀봉 과정은 용기가 채워지고 캡이 씌워진 후에 이루어집니다.
복합재료를 이용한 전자기 유도 밀봉 기술은 현재 세계적으로 인정받는 선진적인 밀봉 방법으로, 비접촉 가열의 특성으로 인해 플라스틱 병(PP, PVC, PET, ABS, HDPE, PS, DURACON), 유리 병 및 다양한 복합 플라스틱 호스의 밀봉에 적합하여 현재 제약, 식품, 그리스, 일용화학, 생활화학 및 농업화학과 같은 산업용 병 밀봉을 위한 가장 진보된 기술입니다.
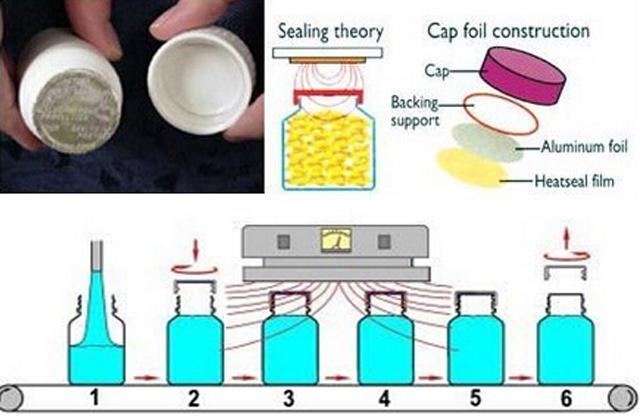
작동 원리 및 작동 방식

폐쇄는 알루미늄 호일 층 라이너가 이미 삽입된 상태로 병입업체에 공급됩니다. 선택할 수 있는 라이너는 다양하지만 일반적인 유도 라이너는 다층입니다. 최상층은 일반적으로 캡에 점착된 종이 펄프입니다. 다음 층은 알루미늄 호일 층을 펄프에 결합하는 데 사용되는 왁스입니다. 최하층은 호일에 적층된 폴리머 필름입니다. 캡 또는 폐쇄가 적용된 후 용기는 진동하는 전자기장을 방출하는 유도 코일 아래로 통과합니다. 용기가 유도 코일(밀봉 헤드) 아래로 통과하면 전도성 알루미늄 호일 라이너가 와전류로 인해 가열되기 시작합니다. 열은 왁스를 녹이고 펄프 백킹에 흡수되어 호일이 캡에서 방출됩니다. 폴리머 필름도 가열되어 용기의 입술로 흐릅니다. 냉각되면 폴리머가 용기와 결합되어 밀폐된 제품이 됩니다. 용기나 그 내용물은 부정적인 영향을 받지 않습니다. 생성된 열은 내용물에 해를 끼치지 않습니다.
호일이 과열되어 밀봉 층과 보호 장벽이 손상될 수 있습니다. 이는 초기 밀봉 공정 후 몇 주가 지나도 밀봉에 결함이 생길 수 있으므로 유도 밀봉의 적절한 크기는 특정 제품을 실행하는 데 필요한 정확한 시스템을 결정하는 데 중요합니다.
밀봉은 휴대형 장치나 컨베이어 시스템을 사용하여 수행할 수 있습니다.
최근 개발된 기술(소수의 응용 분야에 더 적합)을 사용하면 폐쇄 없이도 용기에 호일 씰을 적용하는 데 유도 밀봉을 사용할 수 있습니다. 이 경우 호일은 미리 절단된 상태나 릴 형태로 제공됩니다. 릴 형태로 제공되는 경우 다이 컷을 사용하여 용기 목으로 옮깁니다. 호일이 제자리에 있으면 씰 헤드로 눌러지고 유도 사이클이 활성화되어 씰이 용기에 접합됩니다. 이 공정을 직접 적용이라고 합니다.
그림

- 전류계: 전체 기계가 작동하는 동안의 현재 상태를 보여줍니다.
- 작동 표시기: 작동 예외 상태를 표시합니다.
- 과전류 표시기: 비정상적인 작동 상태를 보여줍니다.
- 전력 제어: 전력 컨트롤러.
- 보호 재설정: 정상적인 작동 상태를 복구합니다.
- 전원 스위치: 기계 전체의 전원을 제어합니다.
- 전압계: 전체 기계가 작동하는 동안의 전압 상태를 보여줍니다.
- 컨베이어: 병을 운반합니다.
- 핸드 휠: 다양한 병의 높이 크기에 맞게 조정 가능합니다.
- 리프트 선반: 밀봉 헤드의 높이를 고정하고 올리거나 내리는 데 사용됩니다.
- 밀봉 헤드: 병 뚜껑의 알루미늄 호일을 가열하고 밀봉합니다.
- 조정 속도 : 컨베이어 벨트 작동 버튼의 조정 속도입니다.
- 시작 스위치: 컨베이어 제어 스위치.

- 정격 전압: AC220V50/60Hz
- 기계 순중량: 68kg 50kg
- 최대 전력 : 1800W
- 냉각 방식 : 냉풍/수중 이중 냉각 방식
- 밀봉 직경 : φ15-75mm 15MM-45MM 30MM-60MM
- 병 높이: 20-180mm
- 작업 방법 : 계속 작업
- 적용 범위: 대량 생산 패치
- 밀봉 속도: 0-200병/분
- 포장 크기: 1600*450*1500mm
- 발전기 크기: 1450*410*1300mm
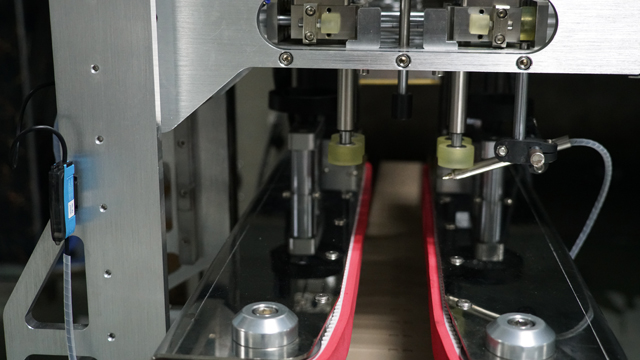
유도 밀봉기에서의 사용 방법

- 병 높이 크기 조정: 병을 "밀봉 헤드" 아래에 놓고 "핸드 휠"을 조정하고 "밀봉 헤드" 바닥과 병 커버 면 사이의 거리가 약 1-3mm인지 확인하고 "시작 스위치"를 "켜짐"으로 돌려 컨베이어 벨트가 작동하도록 한 다음 병이 벨트를 가로질러 이동하여 밀봉 헤드에 닿는지 확인합니다. 딱딱하지 않은 가장 짧은 거리가 가장 좋습니다.
- "속도 제어"로 컨베이어 벨트의 속도를 조정합니다. 알루미늄 호일 밀봉은 벨트 속도와 전력과 관련이 있습니다. 벨트에 병을 몇 개 놓고 "전원 스위치"를 켜고 밀봉 테스트를 합니다. 병이 단단히 밀봉되면 공식적으로 작업이 시작됩니다.
- 부트스트랩 후 부드러운 시작을 기다렸다가 30초 후에 전류계가 3.2A를 표시하면 밀봉을 시작합니다.
- 기기를 종료할 때는 "전원 스위치"와 "시작 스위치"를 끄세요.
인라인 캡핑 머신:
- 생산 용량: 40-60 Caps/min
- 캡 크기: 10-50/35-140mm
- 병 직경: 35-140mm
- 병 높이 : 38~300mm
- 크기(L×W×H): 1000×800×1200mm
- 무게 : 350kg
인라인 캡핑 머신 도면
| 1 | 병 | 2 | 병 고정 |
| 3 | 위치 조정을 위한 핸들 | 4 | 마찰 풀리 |
| 5 | 스트로크 위치 모듈 | 6 | 캡이 실린더를 누르다 |
| 7 | 위치별 핸들 | 8 | 캡핑 조절 모듈 |
| 9 | 캡핑 실린더 | 10 | 캡핑 모터 |
| 11 | 제어 상자 | 12 | 핸드 휠 |
A에서 Z까지 캡핑 조정

병 고정 조정
1. 손잡이를 풀어주세요 (3)
2. 미리 고정해둔 병(1)을 넣어주세요
3. 캡 중심이 실린더(9) 중심과 일치하는지 눈으로 확인하고 일치되면 핸들(3)을 고정합니다.
캡핑 높이 조정﹒
1. 손잡이를 풀어주세요 (7)
2. 핸들(12)을 조정하여 캡핑 마찰 휠(4) 바닥 거리가 캡 바닥과 2mm가 되도록 하고 핸들(7)을 고정합니다.
캡핑 마찰 간격 조정:
1. 공기원을 닫으세요
2. 마찰 휠 사이에 고정 캡을 끼웁니다(4)
3. 마찰 휠(4)을 움직여 스트로크 모듈(5) 나사를 조정하여 캡에 접근합니다(양쪽 모두 눈으로 측정하여 대칭이어야 함). 오른쪽 fas는 각 측면에 대해 2mm~3mm여야 합니다.
캡핑 실린더 높이 조정(캡 샘플에 따라)
1. 나사(8)를 풀어서 캡핑 실린더(9)가 튀어나오게 합니다.
2. 캡핑너트에서 캡 상단까지의 거리는 1mm~2mm로 유지하세요.
3. 나사(8)를 조입니다.
캡핑 실린더 속도 조정
1. 공급전원과 공기원을 연결하여 공기압에 맞는 압력설정(표준 0.74mpa~0.6Mpa)을 조정합니다.
2. 캡핑 시간과 캡핑 간격(표준 1초~1.5초)을 조정하고 상태를 수동으로 선택하고 페달 스위치를 조정하여 좌우 마찰 휠 공압 속도를 조정합니다. 마지막으로 양쪽 속도가 동일한 수준이 되도록 합니다.
3. 캐핑 실린더 속도를 조정하세요.
기계 테스트 실행
1. 캡핑 테스트 실행을 위해 제품 하나를 꺼냅니다. 캡핑 효과에 따라 캡퍼를 수리합니다.
2. 비틀림력에 따라 토크를 조정하세요.
캡핑 및 밀봉용 병 샘플










